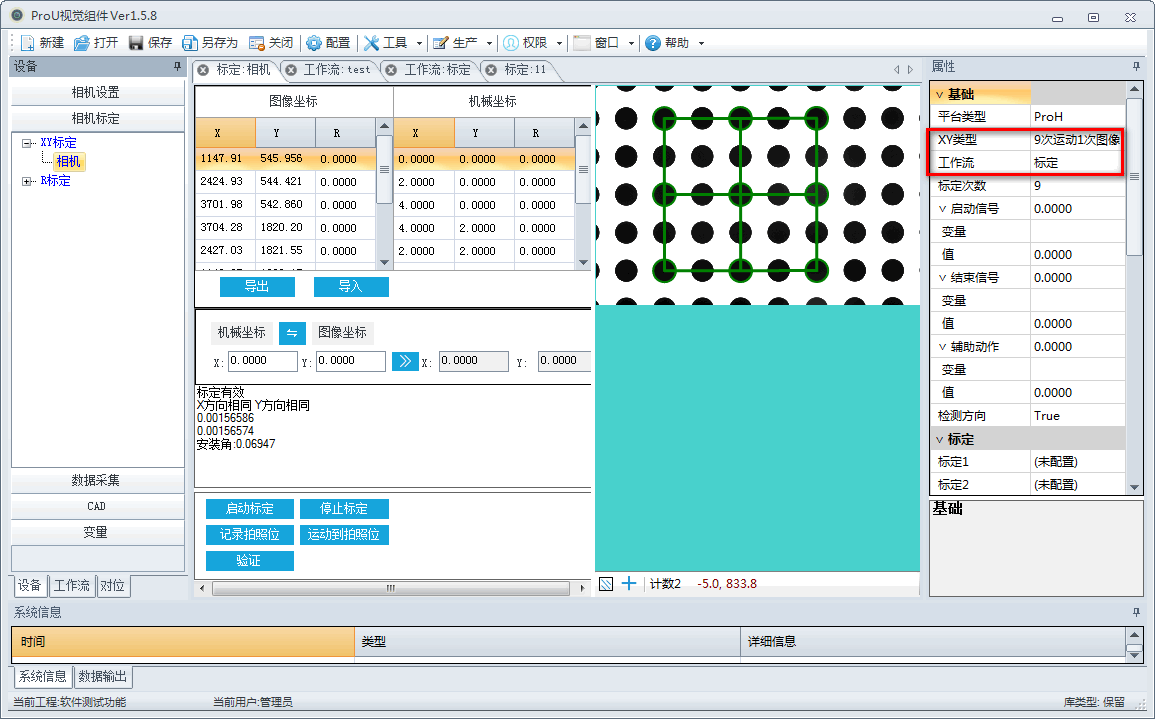
虽然不需要轴参与标定,但是需要通过轴运动把机械坐标写到标定文件中,如下图:
1.1.配置两个虚拟轴
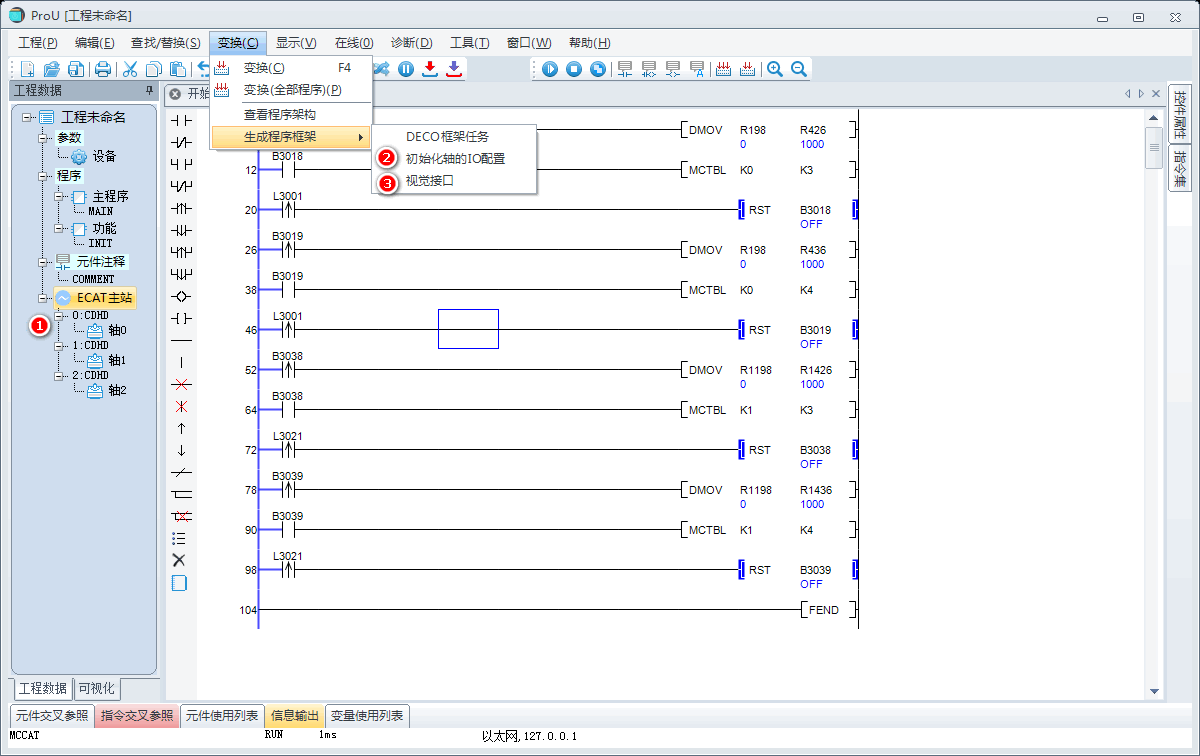
1.2.初始化轴的IO配置
1.3.生成X(轴0)、Y(轴1)轴视觉接口
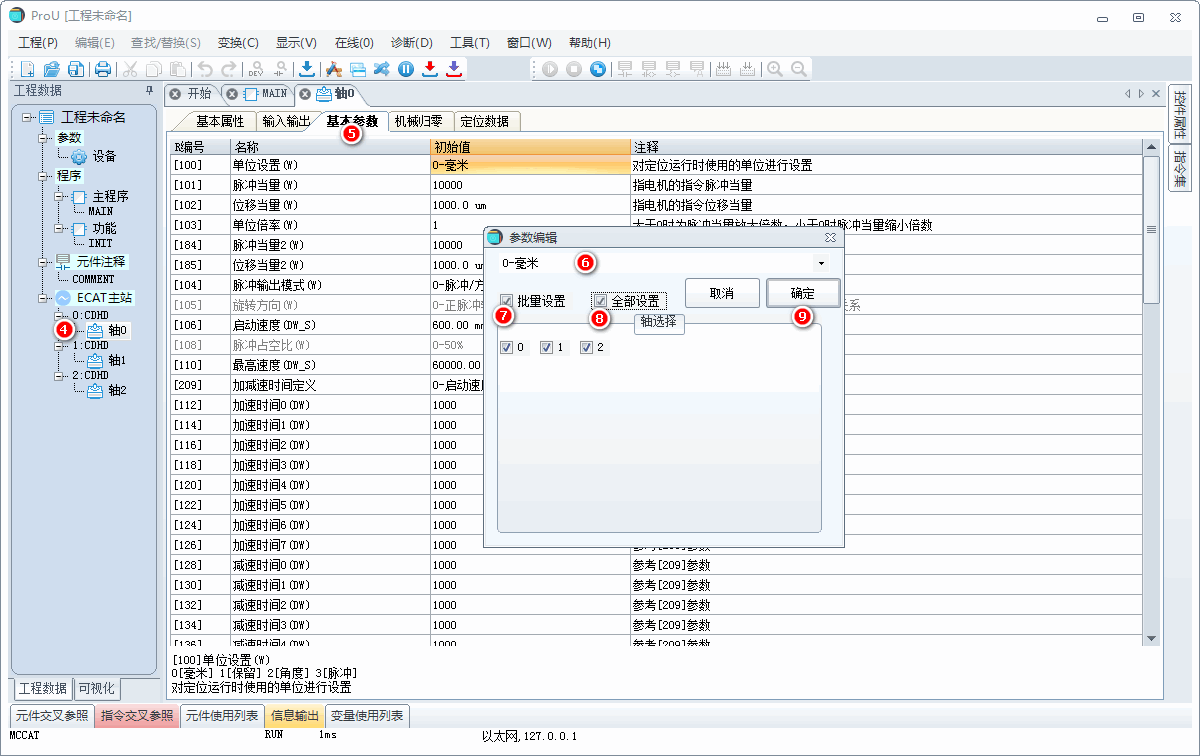
1.4.双击轴0面,
1.5.选择基本参
1.6.单位设置 设置成毫米
1.7.勾选批量设置
1.8.勾选全部设置
1.9.确认
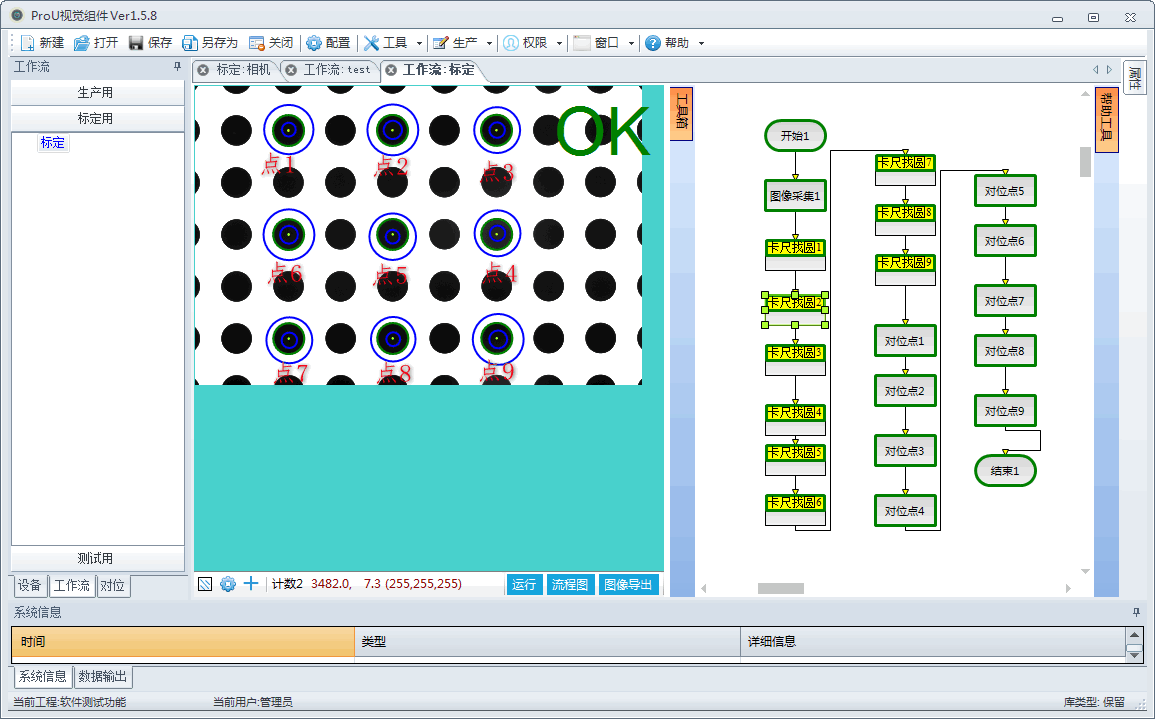
3.1.选择标定的类型和工作流
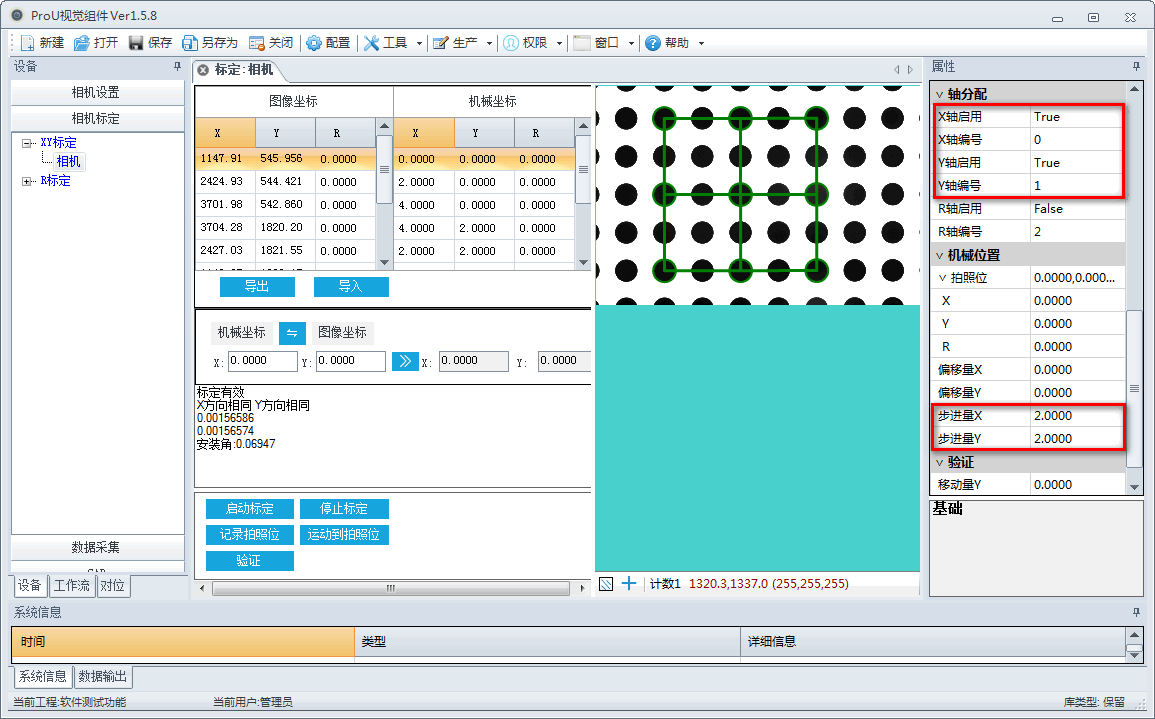
3.2.选择轴号和填写标定板上找的点的间距
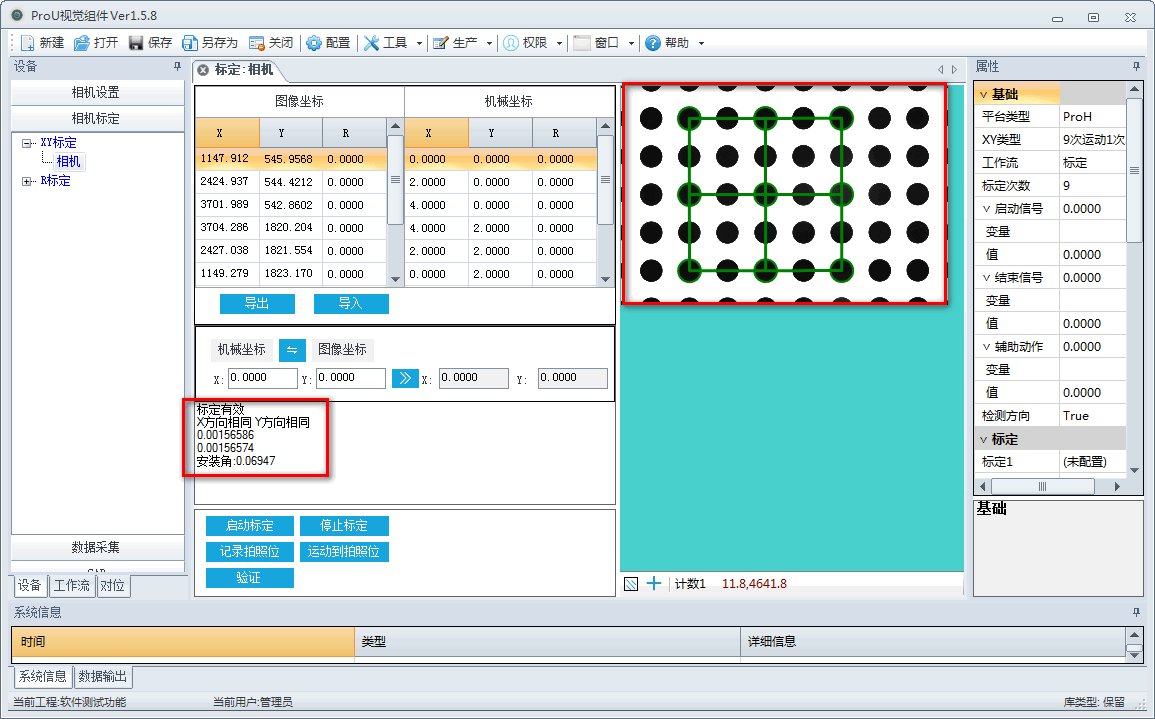
标定成功会显示像素当量,和标定板坐标系与相机坐标系的角度,如下图: